هوش مصنوعی به رباتها کمک میکند تا اشیا را با تمام بدنشان دستکاری کنند
تیم تحریریه
- ۴ شهریور ۱۴۰۲
- زمان مطالعه 2 دقیقه
با استفاده از یک تکنیک جدید، رباتها میتوانند بهصورت موثر با استفاده از چیزی بیش از نوک انگشتانشان در مورد اجسام متحرک درک و استدلال نمایند.
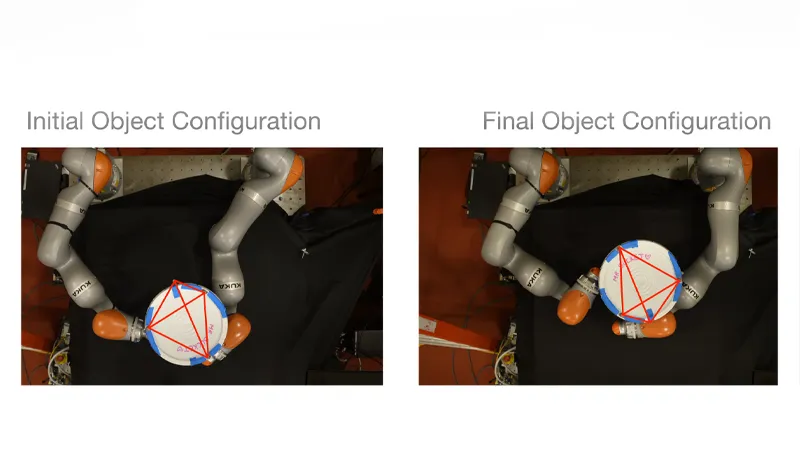
به گزارش هوشیو، تصور کنید که میخواهید یک جعبه بزرگ و سنگین را از یک پله بالا ببرید. در این وضعیت احتمالا انگشتان خود را باز کرده و سپس آن جعبه را با دو دستتان بلند میکنید، در مرحله بعدی آن را بالای ساعد خود نگه داشته و آن را در برابر قفسه سینه خود متعادل میکنید. به این ترتیب میتوان گفت شما از تمام بدنتان برای جابهجایی یک جعبه استفاده خواهید کرد.
انسانها به طور کلی در استفاده از کل بدن خود مهارت دارند، در حالی که رباتها در انجام همین کار با مشکلاتی روبهرو هستند. برای رباتها رسیدگی به موقعیتهایی که در آن به عنوان مثال باید یک جعبه را جابهجا کنند، از آنجایی با هر قسمتی از انگشتان، بازوها یا تنه آنها تماس برقرار میکند، چالش برانگیز است. هر یک از این نقاط، برای ربات یک تماس رویدادی در نظر گرفته میشود که ربات باید آن را تجزیهوتحلیل و درک نماید. با این حال، به دلیل تعداد زیاد رویدادهای تماسی احتمالی، برنامهریزی برای آنها به طور فزایندهای برای ربات پیچیده و غیرقابل مدیریت میشود.
اکنون محققان MIT راهی برای سادهسازی این فرایند پیدا کردهاند که به برنامهریزی دستکاری غنی از تماس معروف است. آنها از یک تکنیک هوش مصنوعی به نام «هموارسازی» استفاده میکنند که بسیاری از رویدادهای تماس را در تعداد کمتری از تصمیمات خلاصه مینماید و حتی یک الگوریتم ساده را قادر میسازد، بهسرعت یک برنامه دستکاری موثر برای ربات را شناسایی نماید.
در حالی که این روش هنوز در روزهای اولیه آزمایش خود قرار دارد، اما بهصورت بالقوه میتواند کارخانهها را قادر به استفاده از رباتهای کوچکتر و متحرکی نماید که میتوانند اشیاء را با تمام بازوها یا بدن خود کنترل و جابهجا نمایند و جایگزین بازوهای رباتیک بزرگی شوند که تنها میتوانند با نوک انگشت خود این وظایف را عهدهدار گردند. روش جدید این پتانسیل را دارد که به کاهش مصرف انرژی و کاهش هزینهها کمک نماید. علاوه بر این، این تکنیک میتواند در رباتهایی که برای مأموریتهای اکتشافی به مریخ یا دیگر اجرام منظومه شمسی فرستاده میشوند، مفید باشد. زیرا آنها میتوانند بهسرعت تنها با استفاده از یک رایانه داخلی با محیط سازگار شوند.
به جای اینکه این سیستم را چیزی مرموز و نامفهوم مانند جعبه سیاه بدانیم، اگر بتوانیم ساختار این سیستمهای رباتیک را از طریق مدلها درک و استفاده کنیم، این شانس را داریم که فرایند تصمیمگیری را تسریع و ابزارهای غنی از تماس فیزیکی ایجاد نماییم.