یافتن افراد گمشده توسط رباتهای پرنده
تیم تحریریه
- ۱۶ بهمن ۱۴۰۱
- زمان مطالعه 2 دقیقه
محققان دانشگاه تورنتو در حال توسعه یک سیستم پژواک برای رباتهای کوچکاند. در واقع، دانشمندان و متخصصان رباتیک، مدتهاست که سعی دارند در پژوهشهای خود از طبیعت الهام بگیرند، تا ویژگیهای جدیدی را برای ماشینها توسعه دهند. در این مورد، محققان دانشگاه تورنتو با الهام گرفتن از خفاشها و سایر حیواناتی که با پژواک سروکار دارند، روشی را طراحی کردهاند که در قالب یک پهپاد پرنده کوچک این امکان را فراهم میکند که توانایی هدایت خود را داشته باشند. روشی که نیازی به سختافزارهای گرانقیمت یا قطعات زیاد یا خیلی بزرگ ندارد و تنها از سختافزار صوتی یکپارچه یک ربات پوک تعاملی استفاده میکند، به طوری که با استفاده از میکروفن و بلندگوهای ارزانقیمت برای این پهپاد پرندهای کوچک که در کف دست قرار میگیرد، یک عرشه صوتی را میسازد.
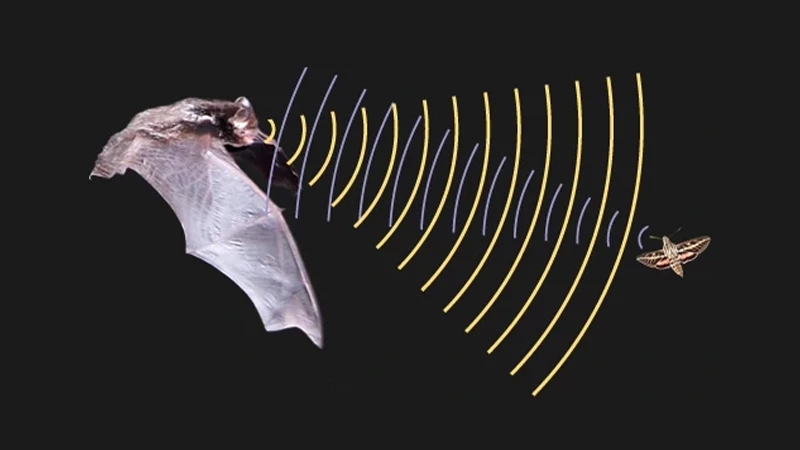
این سیستم دقیقاً مانند اکولوکاسیون خفاش کار میکند. این دستگاه برای انتشار صداها در فرکانسها طراحی شده بود که میکروفن ربات آنها را هنگام پرش از دیوارها دریافت میکند. محققان با آگاهی از این موضوع، الگوریتمی را ایجاد کردند که قادر است برای تجزیه و تحلیل امواج صوتی و ایجاد نقشهای با ابعاد اتاق کار کند.
در مقالهای که در IEEE Robotics and Automation Letters منتشر شد، محققان اذعان کردهاند که الگوریتمهایی که در حال حاضر وجود دارد، برای پژواکیابی فعال، توسعه کمتری یافتهاند. این الگوریتمها اغلب بر نیازهای سختافزاری متکی هستند که با وجود این برای رباتهای کوچک قابل استفاده نیستند. به عقیده آنها روشی که پیاده کردهاند، در زمان واقعی اجرا میشود و نیازی به کالیبراسیون یا آموزش قبلی ندارد. راهحل آنها میتواند به این مدل رباتهای کوچک، این قابلیت را بدهد که در مأموریتهای جستجو و نجات یا مکانهایی که قبلاً توسط رباتهای بزرگتر شناسایی نشدهاند، فرستاده شوند. جالب این است که به دلیل آنکه سیستم فقط به تجهیزات صوتی داخلی یا سختافزار ارزانقیمت نیاز دارد، کاربردهای بالقوه زیادی خواهد داشت.
البته ناگفته نماند که محققان در طول آزمایشهای خود دریافتند که تکنیک آنها هنوز به اندازه سیستمهایی که از سختافزارهای بزرگتر و گرانقیمتتر مانند سنسورهای GPS یا دوربینها استفاده میکنند، دقیق نیست. آنها امیدوارند که دقت این ربات را در نسخههای بعدیاش بیشتر کنند، به طوری که به غیر از صداهایی مانند چرخش ملخهای پهپاد، نیاز نباشد صداهای دیگری از سیستم تولید شود.