آموزش پرواز پهپاد از روی موانع با سرعت بالا
تیم تحریریه
- ۲۸ مهر ۱۴۰۰
تیمهای حاضر در مسابقات پهپادهای خودران گاهی سرافراز بیرون میآیند و گاهی در پی حوادث پیشبینی نشده از گردونه مسابقات کنار میروند. در این مسابقات، پهپادی که مسیر مسابقه را با بالاترین سرعت طی کند، برنده است. اما هرچه سرعت پرواز پهپاد بیشتر باشد، ناپایدارتر و پیشبینی آیرودینامیک آنها دشوارتر میشود. بنابراین، برخورد و تصادفات در این مسابقات کاملاً متداول و اغلب تماشایی هستند.
اما اگر پرواز پهپاد با سرعت و چالاکی بیشتری باشد، میتوان از آنها خارج از فضای مسابقات و در عملیاتهای حساس، از جمله عملیات امداد و نجات، استفاده کرد.
مهندسان هوافضای موسسه فناوری ماساچوست (MIT) الگوریتمی برای پرواز پهپاد طراحی کردهاند که کمک میکند سریعترین مسیر را بدون برخورد با موانع پیدا کند. الگوریتم جدید از ترکیب پروازهای شبیهسازی یک پهپاد از روی موانع مجازی با دادههای حاصل از پروازهای یک پهپاد واقعی از روی همان موانع در مسیر واقعی تشکیل شده است.
بر اساس یافته محققان، پهپادی که با الگوریتم جدید آموزش دیده، میتواند این مسیر ساده را 20 برابر سریعتر پهپادهای معمولی طی کند. البته اینطور نیست که پهپاد مجهز به این الگوریتم همیشه از رقبای خود در تمام طول مسیر پیشی گرفته باشد. در برخی موارد، الگوریتم پرواز پهپاد فوقالذکر برای عبور از یک پیچ تند سرعت پرنده را کم میکرد، یا انرژی را ذخیره میکرد تا در انتهای مسیر سرعت پهباد را افزایش داده و از رقیب خود پیشی بگیرد.
اِزرا تَل، دانشجوی تحصیلات تکمیلی از دانشکده هوافضای موسسه فناوری ماساچوست، میگوید: «در سرعتهای بالا، آیرودینامیک پهپاد پیچیده و شبیهسازی آن دشوار است، بنابراین از آزمایشات در محیط واقعی برای رفع کمبودهای اطلاعاتی استفاده کردیم تا، برای مثال، الگوریتم یادبگیرد بهتر است ابتدا سرعت پهپاد را کم کند و بعداً آن را افزایش دهد. با این رویکرد کلگرایانه توانستیم بالاترین سرعت ممکن برای عبور از مسیر را بدست آوریم».
سِرتاچ کارامان، دانشیار هوافضا و مدیر آزمایشگاه اطلاعات و سیستمهای تصمیمگیرنده موسسه فناوری ماساچوست، میافزاید: «این الگوریتمها گامی بسیار ارزشمند در جهت توانمندسازی هواپیماهای بدون سرنشین در آینده به شمار میآیند، پهپادهای که میتوانند به سرعت در محیطهای پیچیده حرکت کنند. واقعاً امیدواریم که محدودیتهای این پرندهها را برطرف کنیم به نحوهی که بتوانند بیشترین استفاده رو از ساختار مکانیکی و جسمانی خود ببرند».
پژوهشگران سازنده این الگوریتم، تل، کارامان و رِیو گیلهیان، دانشجوی تحصیلات تکمیلی موسسه فناوری ماساچوست، نتایج تحقیقات خود را در ژورنال تحقیقات رباتیک (Robotics Research) منتشر کردند.
تاثیرات سرعت پرواز پهپاد
آموزش پرواز از روی موانع به پهپادها نسبتاً ساده است البته در صورتی که آنها را با سرعت کم به پرواز درآورید زیرا در سرعت کم آیرودینامیک، از جمله کشش، عموماً تاثیری بر سرعت ندارد و در مدلسازی رفتار پهپاد میتوان آن را کنار گذاشت. اما در سرعتهای بالا، تأثیرات آیرودینامیک به مراتب بیشتر است و پیشبینی نحوه کنترل آنها توسط پهپاد دشوارتر است.
طبق توضیحات رِیو، «هنگامیکه پهپاد سریع پرواز میکند، تخمین موقعیت آن دشوار است. و ممکن است الگوریتم سیگنالها را با تاخیر برای موتور ارسال کند یا ممکن است پهپاد دچار افت ناگهانی ولتاژ، و به تَبَع آن دیگر اختلالات دینامیکی شود. این تاثیرات را نمیتوان با رویکردهای متداول مدلسازی نمود.
برای درک بهتر تأثیر آیرودینامیکِ سرعتِ بالا بر پرواز پهپادها، لازم بود محققان آزمایشهای بسیاری را در آزمایشگاه انجام دهند و پهپاد را با سرعتهای مختلف در مسیر پرواز قرار دهند تا تنظیمات مناسب (سرعت بالا و بدون برخورد) را بدست آورند؛ فرآیندی پرهزینه و اغلب پر تصادف.
در عوض، تیم موسسه فناوری ماساچوست الگوریتمی برای برنامهریزی پرواز با سرعت بالا ایجاد کرد که اطلاعات شبیهسازیها و آزمایشهای واقعی را با هم ترکیب میکرد، و تعداد آزمایشهای مورد نیاز برای شناسایی مسیرهای سریع و ایمن را به حداقل میرساند.
محققان کار خود را با مدلِ فیزیکی برنامهریزی پرواز آغاز کردند. ابتدا مدل را برای شبیهسازی رفتار پهپاد هنگام پرواز در یک مسیر مجازی توسعه داده و هزاران سناریوی مسابقه را شبیهسازی کردند. هر کدام از سناریوها مسیر پرواز و الگوی سرعت متفاوتی داشت. سپس این سناریوها را به دو دسته امکانپذیر (ایمن)، یا غیر ممکن (مواردی که منجر به سقوط میشدند) تقسیم و روی نمودار نشان دادند. محققان با کمک این نمودار بر روی سناریوهایی تمرکز کردند که با پرواز در آنها، به احتمال زیاد پهپاد میتوانست در محیط واقعی با موفقیت، یعنی با بالاترین سرعت ممکن و بدون برخورد، پرواز کند.
تَل در این باره توضیح میدهد: «میتوانیم از این شبیهسازی ارزان و سریع برای تعیین مسیرهای پرواز با بالاترین سرعت و امکانپذیر استفاده کنیم. سپس پهپاد را در این مسیرها به پرواز درآورده و بررسی میکنیم که کدام یک از این سناریوها در محیط واقعی امکانپذیر هستند. در پایان به یک مسیر بهینه میرسیم که پهپاد در کمترین زمان ممکن طی میکند».
کم کردن سرعت برای سریعتر شدن
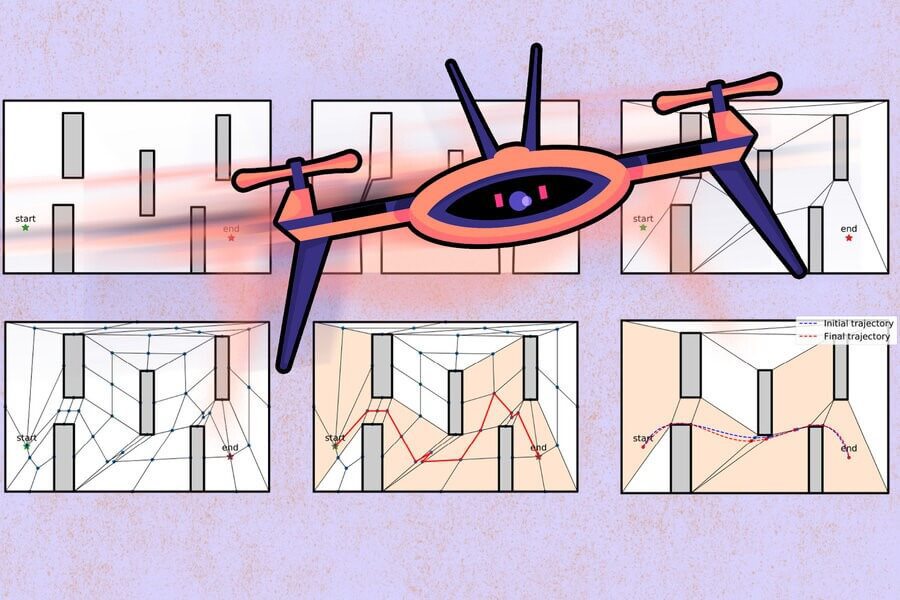
محققان برای نشان دادن رویکرد جدید خود، پرواز پهپاد را در مسیری ساده شبیهسازی کردند. مسیر از پنج مانع بزرگ و مربع شکل تشکیل شده بود که به صورت ضربدری قرار گرفته بودند. سپس، مسیری مشابه همین مسیر را در آزمایشگاه ساخته و یک پهپاد را با سرعت و در مسیری که از اطلاعات شبیهسازی اولیه بدست آورده بودند، به پرواز در آوردند. محققان همچنین، همین آزمایش را با پهپادی که با الگوریتمی متعارف آموزش دیده بود اجرا کردند. این الگوریتم برای انجام این آزمایش برنامهریزی نشده بود.

به طور کلی، پهپادی که با الگوریتم جدید آموزش دیده بود، در تمام مسابقات «اول» شد و نسبت به پهپادی که با الگوریتم متعارف آموزش دیده بود، مسیر را در زمان کوتاهتری به پایان رساند. در برخی از سناریوها، با اینکه پهپادِ برنده در ابتدای مسیر سرعت کمتری داشت، برای مثال، دور زدن آن طولانیتر میشد، در مجموع 20 درصد سریعتر از رقیب خود مسیر را به پایان رساند. پهپادی که با الگوریتمهای متعارف آموزش دیده بود، این نوع تنظیمات ظریف را انجام نمیداد؛ احتمالاً به این دلیل که سیستم تعیین مسیر پهپاد که صرفاً بر اساس شبیهسازیها عمل میکرد، نمیتوانست اثرات آیرودینامیکی را که آزمایشات این تیم پژوهشی در محیط واقعی بدست آوره بودند، در نظر بگیرد.
گام بعدی این تحقیقات شامل افزایش سرعت و پیچیدگی مسیر است. این محققان احتمالاً دادههای بدست آمده از مسابقات پهپادهای کنترلی را به الگوریتم خود اضافه خواهند کرد. در این مسابقات انسان هدایت پهپاد را از راه دور در اختیار دارد و تصمیمات و مانورهای او ممکن است به محققان کمک کند بتوانند بر روی پروازهای سریعتر و امکانپذیر متمرکز شوند.
تل در پایان میگوید: «انسان برای عبور دادن پهباد از یک مسیر، سرعت آن را کم یا زیاد میکند. همین اطلاعات میتواند برای تعیین عملکرد الگوریتم ما سازنده باشد. علاوه بر این، میتوانیم مسیر انتخابی انسان برای پرواز را نقطه شروع در نظر گرفته و پرواز را ارتقاء دهیم. مثلاً، برای افزایش سرعت میتوانیم کارهایی را اضافه کنیم که انسان انجام نداده اما الگوریتم آنها را تشخیص داده است. اینها از جمله مواردی هستند که قصد داریم در آینده اجرا کنیم».