هوش مصنوعی، مغز متفکر گلایدرهای زیردریایی خودران
 پریسا سلامتی
پریسا سلامتی- ۱۳ مرداد ۱۴۰۴
در طول سالها، دانشمندان علوم دریایی همواره از توانایی حیرتانگیز حیواناتی مانند ماهیها و فوکها در شنا کردن مؤثر و کممصرف، با وجود تفاوت در فرم بدنیشان، شگفتزده بودهاند. بدن این جانداران به گونهای طراحی شده که برای حرکت در آب بسیار هیدرودینامیک و بهینه باشد، بهطوریکه انرژی بسیار کمی برای طی مسافتهای طولانی مصرف میکنند.
رباتها، زیر آب
وسایل نقلیه خودران نیز میتوانند بهصورت مشابهی در آب شناور شوند و دادههایی از محیطهای وسیع زیر سطح دریا جمعآوری کنند. با این حال، تنوع در طراحی شکل این ماشینهای گلایدر بسیار کمتر از تنوع اشکال موجود در حیات دریایی است. اغلب طراحیها به شکل لوله یا اژدر انجام میشود، چراکه این فرمها نیز تا حدی هیدرودینامیک هستند. افزون بر آن، آزمایش و توسعه طرحهای جدید، نیازمند آزمون و خطاهای فراوان در دنیای واقعی است.
اما پژوهشگران آزمایشگاه علوم رایانه و هوش مصنوعی MIT (CSAIL) و دانشگاه ویسکانسین مدیسن، روشی نوآورانه را پیشنهاد دادهاند که به کمک هوش مصنوعی میتواند مسیر طراحی گلایدرهای دریایی را متحول کند. این روش با بهرهگیری از یادگیری ماشین، طرحهای سهبعدی مختلف را در شبیهساز فیزیکی مورد ارزیابی قرار میدهد و آنها را به فرمهایی با راندمان هیدرودینامیکی بالاتر تبدیل میکند. این مدلهای نهایی میتوانند با استفاده از چاپگرهای سهبعدی و با صرف انرژی بسیار کمتر نسبت به روشهای دستی، ساخته شوند.
دانشمندان MIT معتقدند که این فرایند طراحی میتواند به تولید گلایدرهای کارآمدتری منجر شود که به اقیانوسنگاران کمک میکنند تا دما و شوری آب را اندازهگیری، جریانهای دریایی را بهتر درک کرده و اثرات تغییرات اقلیمی را با دقت بیشتری پایش کنند. آنها برای اثبات این ایده، دو گلایدر به اندازه یک تختهی بوجی (boogie board) که نوعی تخته موجسواری است، ساختند؛ یکی با دو بال که شباهتی به هواپیما داشت و دیگری با چهار بال که مانند یک ماهی تخت با چهار باله طراحی شده بود.
دکتر «پیتر ییچن چن»، پژوهشگر فوقدکتری در CSAIL و یکی از محققان اصلی این پروژه، توضیح میدهد که این تنها نمونهای از اشکال نوینی است که رویکرد تیم آنها قادر به تولید آن است. او میگوید: «ما یک فرایند نیمهخودکار طراحی کردهایم که میتواند امکان بررسی فرمهای غیرمتعارفی را فراهم کند که طراحی آنها برای انسان بسیار دشوار و زمانبر خواهد بود. این سطح از تنوع در شکلها تاکنون مورد مطالعه قرار نگرفته و بسیاری از این طراحیها هنوز در دنیای واقعی آزمایش نشدهاند.»
اما هوش مصنوعی چگونه به این طراحیها رسیده است؟
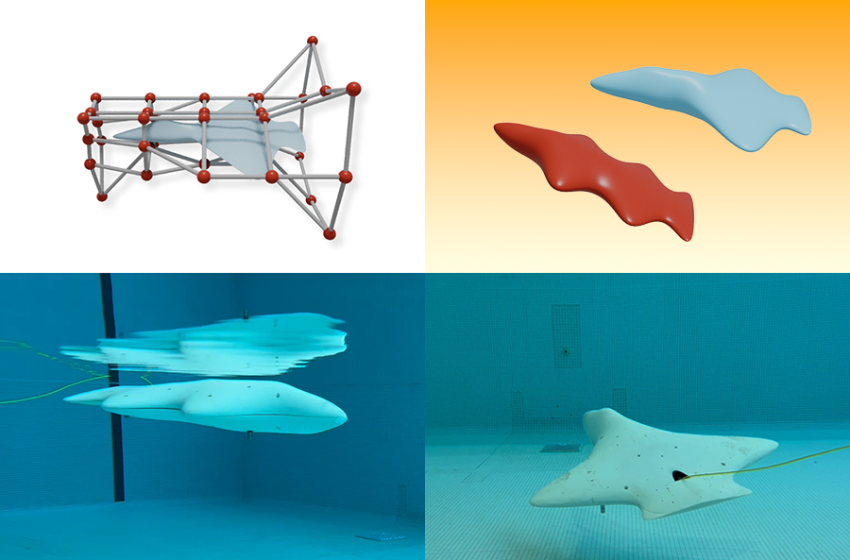
در مرحله نخست، پژوهشگران بیش از ۲۰ مدل سهبعدی از فرمهای رایج در کاوشهای دریایی مانند زیردریاییها، نهنگها، سفرهماهیها و کوسهها را جمعآوری کردند. سپس این مدلها را در ساختارهایی موسوم به «قفس تغییر شکل» (deformation cages) قرار دادند؛ قفسهایی که نقاط مختلف بدنه را برای اعمال تغییرات در فرم مشخص میکردند. پژوهشگران با جابهجا کردن این نقاط، فرمهای جدیدی تولید کردند.
در گام بعد، تیم CSAIL یک مجموعه داده متشکل از فرمهای اصلی و فرمهای تغییر یافته ایجاد کرد و آنها را در زوایای مختلف حمله (angles-of-attack) شبیهسازی کرد. یعنی زاویهای که یک وسیله هنگام حرکت در آب به خود میگیرد. برای مثال، شناگری که بخواهد وسیلهای را از کف استخر بردارد، ممکن است با زاویه ۳۰- درجه شیرجه بزند.
در نهایت، این اشکال متنوع و زوایای حمله به عنوان ورودی یک شبکه عصبی مورد استفاده قرار گرفتند تا بازدهی گلایدرها را در زوایای مختلف پیشبینی کرده و در صورت نیاز آنها را بهینهسازی کند.
افزایش بهرهوری رباتهای شناور
شبکه عصبی توسعهیافته توسط تیم تحقیقاتی، عملکرد گلایدرهای زیرآبی را در برابر نیروهای فیزیکی درون آب شبیهسازی میکند. این مدل تلاش میکند نحوه حرکت رو به جلوی گلایدر و نیروی مقاومتی وارد بر آن را بهدقت پیشبینی کند. هدف نهایی، دستیابی به بهترین نسبت «نیروی بالابر به نیروی پسا» (Lift-to-Drag) است، یعنی مقایسه نیرویی که گلایدر را به جلو میبرد در برابر نیرویی که آن را کند میکند. هرچه این نسبت بیشتر باشد، حرکت گلایدر در آب کارآمدتر خواهد بود و هرچه کمتر باشد، گلایدر در مسیر خود کندتر میشود.
این نسبت، مفهومی کلیدی در طراحی هواپیما نیز هست. هنگام برخاست، افزایش نیروی بالابر برای پرواز مؤثر در برابر جریان باد ضروری است و هنگام فرود، نیروی پسا باید کافی باشد تا هواپیما بهطور کامل متوقف شود.
«نیکلاس هاگمان»، دانشجوی دکترای معماری در MIT و از اعضای وابسته به آزمایشگاه CSAIL، تأکید میکند که همین اصل در حرکت شناورهای دریایی نیز کاربرد دارد. او میگوید:
«فرایند ما شکل گلایدر را به گونهای اصلاح میکند که بهترین نسبت نیروی بالابر به پسا را داشته باشد و عملکرد آن را در زیر آب بهینه کند. پس از آن، میتوان طراحیهای برتر را صادر کرده و با چاپگر سهبعدی، آنها را تولید کرد.»
یک گام سریع بهسوی آینده گلایدرهای زیردریایی
در حالی که سیستم هوش مصنوعی طراحیشده توسط محققان امیدبخش به نظر میرسید، آنها برای اطمینان از دقت پیشبینیهای آن درباره عملکرد گلایدرها، نیاز داشتند آزمایشهایی در محیطهای واقعیتر انجام دهند.
ابتدا آنها یک گلایدر با طراحی دو بال را به شکل نسخهای کوچک شبیه به هواپیمای کاغذی ساختند و آن را در تونل بادی «برادران رایت» در MIT آزمایش کردند، یک فضای داخلی با فنهایی برای شبیهسازی جریان باد. در این آزمایش، گلایدر در زوایای مختلف قرار گرفت و نسبت برا به پسا (Lift-to-Drag) پیشبینیشده توسط مدل هوش مصنوعی، تنها حدود ۵ درصد بیشتر از مقادیر واقعی اندازهگیریشده بود، اختلافی بسیار اندک میان شبیهسازی و واقعیت.
ارزیابی دیجیتال با یک شبیهساز فیزیکی سهبعدی پیچیدهتر نیز نشان داد که این سیستم هوشمند پیشبینیهای دقیقی از حرکت گلایدرها ارائه داده است و حرکت آنها در محیط سهبعدی بهخوبی قابل مشاهده بود. اما برای ارزیابی واقعی این گلایدرها، تیم تحقیقاتی نیاز داشت عملکرد آنها را در زیر آب نیز بررسی کند. آنها دو طراحی برتر را با چاپگر سهبعدی ساختند: یکی با شکل جت در زاویه حمله ۹ درجه و دیگری با چهار بال در زاویه ۳۰ درجه.
هر دو مدل به صورت پوستههای توخالی طراحی شدند که دارای سوراخهای کوچکی بودند تا هنگام غوطهور شدن در آب پر شوند. این طراحی سبک باعث سهولت حمل و نقل خارج از آب شده و به مواد اولیه کمتری نیاز دارد. درون هر پوسته، یک واحد استوانهای قرار گرفت که شامل سختافزارهایی مانند پمپ تغییر شناوری، سیستم کنترل زاویه حمله و تجهیزات الکترونیکی بود.
نتیجه آزمایشها
هر دو گلایدر طراحیشده با کمک هوش مصنوعی عملکرد بهتری نسبت به نمونه دستساز با شکل اژدر داشتند. آنها با نسبت بالاتر برا به پسا، انرژی کمتری مصرف کردند و مانند جانوران دریایی با کارآمدی در آب حرکت کردند.
با وجود این موفقیت، پژوهشگران به دنبال کاهش فاصله میان شبیهسازی و عملکرد واقعی هستند. آنها همچنین قصد دارند گلایدرهایی بسازند که بتوانند به تغییرات ناگهانی جریانهای آب واکنش نشان دهند و برای شرایط متغیر دریاها و اقیانوسها آماده باشند.
«پیتر ییچن چن» خاطرنشان میکند که تیم او به دنبال بررسی شکلهای جدیدتر، بهویژه طراحی گلایدرهای نازکتر است. آنها همچنین قصد دارند چارچوب طراحی خود را با قابلیتهایی مانند سفارشیسازی بیشتر، مانورپذیری بهتر، یا حتی طراحی وسایل نقلیه مینیاتوری سریعتر و پیشرفتهتر کنند.
این پروژه بهطور مشترک توسط پیتر ییچن چن، نیکلاس هاگمان، و پینگچوان ما پژوهشگر (OpenAI) رهبری شده و همراه با وی وانگ استاد دانشگاه ویسکانسین مدیسون و عضو پیشین (CSAIL)، جان رومَنیشین، و دو استاد MIT از جمله دانیلا روس، مدیر آزمایشگاه و وویچک ماتوسیک نویسنده ارشد مقاله انجام شده است.