
تشخیص اشیاء با حس لامسه پیشرفته در دستان رُباتیک
 تیم تحریریه
تیم تحریریه- ۱۴ فروردین ۱۴۰۲
بهتازگی دانشمندان امآیتی دستاوردی جدید به جهانیان ارائه کردهاند. این دستاورد یک دست رباتیک سه انگشتی است، که میتواند با حساسیت زیادی در تمام طول هر انگشت و «نه فقط در نوک» آن احساس کند.
پژوهشگران MIT یک انگشت رُباتیک نرم، ولی محکم و قدرتمند ساختهاند که حسگرهای قدرتمند لامسه را در تمام طول خود گنجانده است و این حسگرها به او این توانایی را میدهند که بهعنوان یک دست رباتیک، اشیاء را تنها پس از یک بار گرفتن بهطور دقیق شناسایی کند.
پژوهشگران MIT با الهام از انگشتان دست انسان، دست رباتیکی ساختهاند که از حسگر لمسی با پیدایش بسیار بالا برای شناسایی دقیق یک شیء استفاده میکند. بسیاری از دستهای رباتیک تمام حسگرهای خود را در نوک انگشتان قرار میدهند، بنابراین یک شیء باید در تماس کامل با نوک انگشتان باشد و چندین بار گرفته شود تا بتوان آن را شناسایی کرد. البته دستهای دیگری هم وجود دارند، که در امتداد تمام انگشت پخششدهاند و از حسگرهایی با پیدایش پایینتر استفاده میکنند، اما اینها جزئیات زیادی را ثبت نمیکنند، بنابراین در شناسایی اجسام اغلب نیاز به بازنگریهای متعدد دارند.
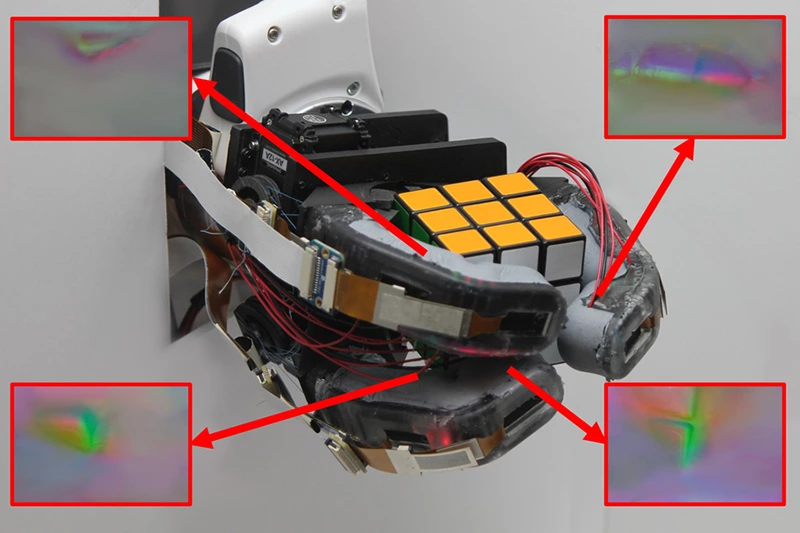
حالا دانشمندان تیم MIT یک انگشت رُباتیک، با یک اسکلت سفتوسخت که در یک لایه بیرونی نرم محصورشده، ساختهاند که دارای چندین حسگر با «پیدایش بالا» در زیر «پوست» نرم و شفاف آن است. حسگرها که از نوعی چشم و دوربین خاص با فناوری LED، برای جمعآوری اطلاعات بصری در مورد شکل جسم استفاده میکنند، حسی پیوسته در تمام طول انگشت بهدست میآورند.
هر انگشت دادههای فراوانی را در بسیاری از قسمتهای یک شیء بهطور همزمان میگیرد؛ با استفاده از این طرح، پژوهشگران یک دست سه انگشتی ساختهاند که میتواند شیء را تنها پس از یک بار گرفتن، با دقت 85 درصد شناسایی کند. اسکلت سخت، انگشتان را بهاندازه کافی قوی میکند تا یک وسیله سنگین مانند مته صنعتی را بردارند، درحالیکه پوستِ نرم، آنها را قادر میسازد تا بهطور ایمن یک آیتم سبک و انعطافپذیر، مانند یک بطری پلاستیکی خالی آب را، بدون له کردن آن بگیرند.
ساندرا لیو، فارغالتحصیل مهندسی مکانیک از امآیتی، یکی از نویسندگان این مقاله پژوهشی در مورد انگشتهای رُباتیک میگوید: «این انگشتان نرم، سفت و سخت میتوانند، برای کاری مثل مراقبت از سالمندان در خانه مفید باشند. این رُبات میتواند با همان دستی که برای کمک به حمام کردن فرد استفاده میکند، یک وسیله سنگین را از قفسه بلند کند. داشتن ویژگیهای «نرمی، سفتی و سختی» در هر دستی بسیار مهم است، ولی توانایی احساس لامسه عالی و دقیق در یک منطقه واقعاً بزرگ از دست نیز به همین اندازه اهمیت دارد. بهخصوص اگر قرار باشد دستها کارهای بسیار پیچیدهای را نیز انجام دهند، مانند کارهایی که دستهای انسان در طول روز انجام میدهند. هدف ما از اینکار، این بود که همه ویژگیهایی که دستهای انسان را بسیار خوب میکند، در یک دست رُباتیک بگنجانیم تا آن دست بتواند کارهایی را که دیگر دستان رباتیک در حال حاضر نمیتوانند انجام دهند، انجام دهد.»
لیو این مقاله را با نویسنده ارشد و دانشجوی کارشناسی مهندسی مکانیک «لئوناردو زامورایانیز» و مشاور او «ادوارد ادلسون»، «پروفسور جان» و «دوروتی ویلسون» استاد علوم بینایی در گروه علوم مغز و علوم شناختی و عضوی از علوم کامپیوتر و مصنوعی نوشته است. آنها این پژوهش را در آزمایشگاه اطلاعات (CSAIL) کامل کردهاند و قرار است گزارش آن در کنفرانس RoboSoft بهعنوان یکی از دستاوردهای برتر MIT ارائه شود.






