یک روبات حفاری با الهام از خرچنگ شنی اقیانوس آرام ساخته شد
 تیم تحریریه
تیم تحریریه- ۱۰ آبان ۱۴۰۱
از دیرباز، انسانها برای ساخت و اختراع ابزار و وسایل جدید از دیگر موجودات زنده الهام میگرفتهاند؛ این بار نیز دانشمندان برای ساخت یک روبات حفاری از یک سختپوست به نام خرچنگ شنی اقیانوس آرام الهام گرفتهاند.
پروژه اخیر پژوهشگرانِ دانشگاه کالیفورنیا-برکلی، یک روبات حفاری برای اعماق کم است که با الهام از چگونگی زمینکاوی نوعی از خرچنگهای شنی اقیانوس آرام بهنام «اِمِریتا آنالوگا» کارکرد حفاری آن را طراحی کردهاند. محصول این پروژه روبات حفاری منحصربهفردی است که از این موجود سختپوست الهام گرفته است. این روبات را میتوان برای ارزیابی خاک مناطق کشاورزی، جمعآوری دادههای دریایی و مطالعه شرایط خاک و سنگ مناطق ساختوساز به کار برد.
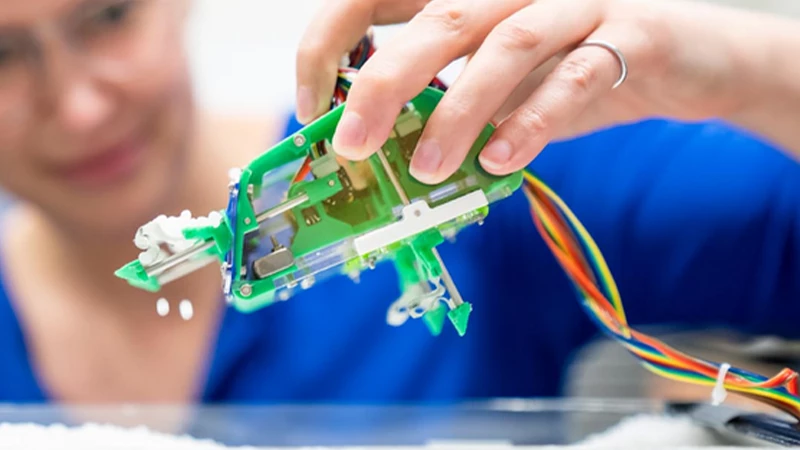
طراحی روبات حفاری که برای اولین بار زمین را عمودی میکَنَد
هانا استوارت، استاد مهندسی مکانیک و همکارانش طی مقالهای که در ژورنال Frontiers in Robotics & AI منتشر کردهاند، از طراحی روباتی رونمایی کردهاند که پا دارد و این روبات برای نخستین بار زمین را عمودی حفاری میکند. پاهای این روبات حفاری که اِمبور نام گرفته مخفف Emerita Burrowing Robot با تکیه بر رویکردی نوین طراحی شدهاند، تا طراحی روبات، قابلیت حرکتِ عمودی روبهپایین داشته باشد و از شیوه حرکت خرچنگهای شنی اقیانوس آرام تقلید کند.
با مشاهده خرچنگهای شنی، حفاری در ماسه، کار آسانی به نظر میرسد؛ اما به گفته لورا تریرز، نویسنده اول مقاله و دانشجوی دکتری مهندسی مکانیک، حرکت در فضاهای دانهای مثل شن و خاک، کار دشواری است، چون هرچه حیوان بیشتر زمین را بکَند، هول دادن دانهها به پشت سر، سختتر میشود و بدین ترتیب، حفاری با مانع روبهرو میشود.
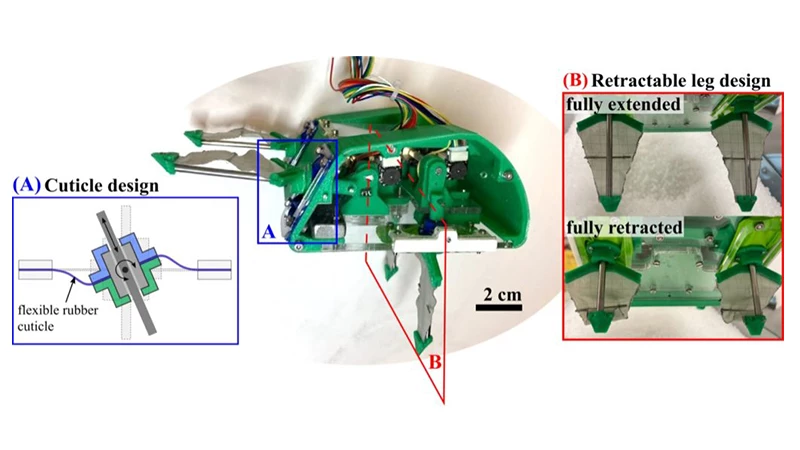
پژوهشگران برای غلبه بر این مشکل، پاهای روبات حفاری را به نحوی طراحی کردند، تا طراحی روبات توان پاسخ به نیرویی دگرسوپذیر را داشته باشد؛ بدین معنی که در یک جهت خاص، نیروی بیشتری را تجربه کنند. پاهای این روبات حفاری، درست مانند شناگرها، هنگام ضربهزدن قدرتی، بسط پیدا میکنند و هنگام ضربات بازگشتی، جمع میشوند.
تریرز برای شرح طراحی روبات حفاری توضیح میدهد: «ساختِ پاهای دگرسوپذیر برای حرکت در محیطهای دانهای اخیراً پیشرفتهایی داشته است، اما این پروژه برای اولین بار پیشرفتها را در یک روبات حفاری به کار برده است.»
خرچنگهای شنی، چالشهای روباتیک را از میان برداشتند
یکی دیگر از چالشهای روباتیک پیش روی پژوهشگران، جلوگیری از ورود دانههای شن به روبات حفاری بود. حل این چالشهای روباتیک هم با رجوع به خرچنگهای شنی امکانپذیر شد.
تریرز درباره این چالشهای روباتیک میگوید: «یک لایه زرهای، شبیه به پوسته لولایی خرچنگهای شنی، به روبات حفاری اضافه کردیم. این پوسته مادهای نرم و انعطافپذیر است که بدون اینکه مانع حرکت روبات حفاری شود، دریچه مفاصل را پوشش میدهد، تا جلوی ورود ذرات به این ناحیه را بگیرد.»
تریرز خاطرنشان میکند: «تاکنون روباتهای حفاری به حرکت کردن در هوا و دریا، تلسط یافتهاند؛ اما برای حرکت داخل زمین پیشرفتی نداشتهاند. به همین دلیل، معدود روبات حفاری وجود دارد که بتواند مثل EMBUR مسیرش در زمین را بهصورت عمودی حفاری کند و بر این چالشهای روباتیک پیروز شود.»
کاربرد روبات حفاری در صنایع گوناگون چیست؟
ولی کاربرد روبات حفاری چیست؟ از آنجایی که روبات حفاری میتواند زیرِ زمین را جستوجو کنند، در صنایع و حوزههای پژوهشی مختلف کاربرد خواهد داشت؛ برای مثال، در بررسی کیفیت خاک زمینهای کشاورزی، مهندسی ژئوفناوری، جمعآوری دادههای دریایی، ساختوساز و حفاری میتوان از کاربرد روبات حفاری استفادهکرد. بهعلاوه، با کاربرد روبات حفاری در وسایل نقلیه دریایی یا کاوشگرهای فضایی، کار گروهی قابل کنترل بین روباتها نیز امکانپذیر میشود.
استوراتز و تریرز، برای طراحی پاهای EMBUR از کمک رابرت فول «استاد زیستشناسی یکپارچه» و مهندسِ برق و علوم کامپیوتر «بنجامین مکاینرو» دانشجوی دکترای بیوفیزیک، استفاده کردند، تا خرچنگهای شنی را در آزمایشگاه مشاهده و تحلیل کنند. کارشناسان دریافتند که پنچجفت پای این حیوان را میتوان به دو گروه تقسیم کرد که هرکدام در دو جهت متفاوت حرکت میکنند. بدین ترتیب، سعی کردند از این قابلیت و همچنین، الگوی حرکتی خرچنگ شنی در طراحی پاهای روبات حفاری و کاربرد روبات حفاری استفاده کنند.
مدلسازی روباتیک در طراحی روباتهای حفاری
در گام بعدی، پژوهشگران با تکیه بر مدلسازی روباتیک و مدلهای فیزیکی، نیروهای وارده بر پاهای خرچنگ شنی را تخمین زدند، تا در طراحی روبات حفاری به آنها کمک کند.
تریرز برای مدلسازی روباتیک اضافه میکند: «با استفاده از نظریه نیروی مقاوم (RFT) نیروهایی وارده بر پاهای خرچنگ را مدلسازی روباتیک کردیم. این رویکرد به ما کمک کرد، تا درک بهتری از خواص هندسی و رفتارهای روبات حفاری بهدست بیاوریم، تا درنهایت، حفاری را به بهترین نحو ممکن انجام دهیم.»
ساخت EMBUR نشان داد که حفاری عمودی در محیطهای خشک، از طریق روباتهای پادار امکانپذیر است. به عقیده پژوهشگران، این پروژه مسیر را برای ساخت سیستمی هموار میکند که قادر به حفاری در شرایط و محیطهای گوناگون باشد.
تریرز در انتها میگوید: «در آینده با ارتقای طراحی روبات حفاری، حفاری عمیقتر را امکانپذیر میکنیم و بهسراغ روشهای مدلسازی روباتیکِ پیشرفتهتر همچون روش المان مجزا (DEM) میرویم، تا رفتار روبات حفاری را بهتر پیشبینی کنیم. امیدواریم این روبات بتواند در سواحل واقعی نیز راه برود، شنا کند و حفاری کند.»
جدیدترین اخبار هوش مصنوعی ایران و جهان را با هوشیو دنبال کنید