نشت یابی لوله گاز به کمک پهپادهای خودمختار
 تیم تحریریه
تیم تحریریه- ۱۸ مرداد ۱۴۰۰
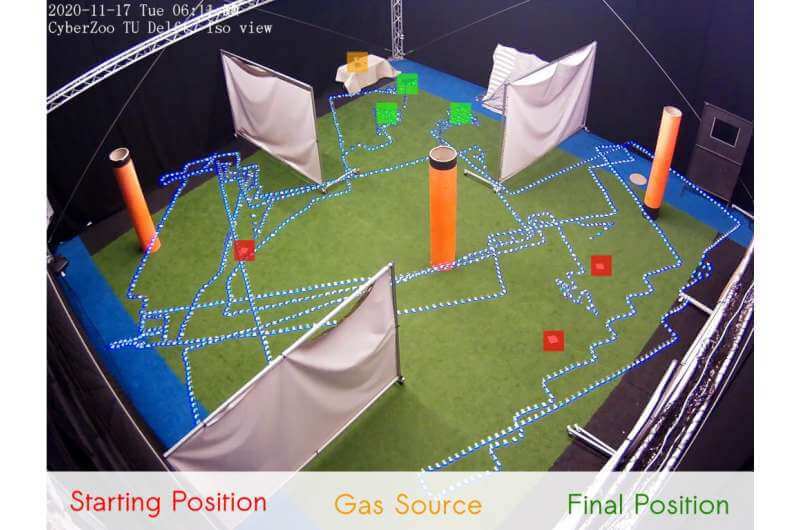
در حال حاضر، در صورت نشت گاز در ساختمانهای بزرگ یا سایتهای صنعتی، آتشنشانها برای نشت یابی از حسگرهای گازی استفاده میکنند. نشت یابی لوله گاز ممکن است مدت زمان زیادی به طول بینجامد و در این میان نباید فراموش کنیم که جان آتشنشانها نیز در خطر است. پژوهشگران دانشگاه صنعتی دلفت (هلند)، دانشگاه بارسلونا، و دانشگاه هاروارد برای اولین بار موفق به ساخت دستهای از پهپادهای ریزاندازه و در عین حال ایمن شدهاند که میتوانند به صورت خودکار ، نشتی گاز و محل آن را در محیطهای بسته تشخیص دهند.
اصلیترین چالشی که پیش روی این پژوهشگران قرار داشت، طراحی هوش مصنوعی برای انجام این وظیفه خطیر، یعنی نشت یابی لوله گاز، بود؛ طراحی این هوش مصنوعی میبایست به گونهای باشد که با توان محاسباتی و حافظه محدود این ریزپهپادها سازگاری داشته باشد. استراتژیهای جستوجو و مسیریابیای که این پژوهشگران برای رفع این مشکل به کار گرفتند از زیستشناسی الهام گرفته شده است. متن کامل این مقاله علمی به صورت عمومی بر روی سرور ArXiv قرار گرفته است و امسال در کنفرانس رباتیک IROS ارائه خواهد شد. این پژوهش گام مهمی در ساخت ریزپهپادهای هوشمند به شمار میرود. انسانها به کمک این رباتها میتوانند در مدت زمان کوتاهی، بدون به خطر انداختن جان دیگران، نشتی را در لولههای گاز پیدا کنند.
مکانیابی خودکار محل نشت گاز
مکانیابی خودکار محل نشت گاز کار دشواری است. اول اینکه در حال حاضر، حسگرهای مصنوعیِ گاز در تشخیص مقادیر کمِ گاز و تغییر در غلظت آن ضعیفتر از بینی حیوانات عمل میکنند. علاوه بر این، محیطی که گاز در آن نشت پیدا میکند نیز ممکن است پیچیده باشد. در نتیجه، در بیشتر پژوهشهایی که در این زمینه صورت گرفته، فقط از یک ربات استفاده شده است و همان یک ربات نیز در محیطی کوچک و بدون مانع به دنبال محل نشت گاز میگردد، طبیعتاً نشت یابی لوله گاز در چنین محیطهایی به مراتب آسانتر است.
دستهای از ریزپهپادها
گیدو دو کرون، استاد تمام در آزمایشگاه وسایل نقلیه هوایی ریزمقیاس وابسته به دانشگاه صنعتی دلفت، میگوید:« به عقیده ما، ریزپهپادهایی که به صورت گروهی فعالیت میکنند ابزاری مؤثر برای مکانیابی خودکار محل نشت گاز هستند.» به گفته وی، اندازه کوچک این پهپادها باعث میشود هیچ خطری برای انسانها و وسایل و تجهیزات موجود در ساختمان نداشته باشند. از سوی دیگر، این ریزپهپادها قادر به پرواز هستند و به همین دلیل میتوانند منبع گاز را در سه بُعد جستوجو کنند. در ضمن، اندازه کوچک آنها باعث میشود بتوانند در محیطهای بسته و باریک پرواز کنند. و نکته آخر اینکه، اگر این ریزپهپادها به صورت گروهی فعالیت کنند سریعتر میتوانند منبع گاز را مشخص کنند و از جایی که غلظت گاز بسیار زیاد است عبور کنند و محل اصلی نشت گاز را پیدا کنند.
با این حال، تمامی ویژگیهایی که به آنها اشاره کردیم، تجهیز این ریزپهپادها به هوش مصنوعی را نیز دشوار میکنند. توان پردازشی و حسی این ریزپهپادها، به استثنای الگوریتمهای هوش مصنوعی که در وسایل نقلیه خودران به کار میروند، محدود است. از این گذشته، راهاندازی این ریزپهپادها به صورت گروهی نیز مشکلاتی به همراه میآورد، زیرا، این پهپادها باید برای جلوگیری از تصادفات و داشتن یک همکاری سازنده مراقب یکدیگر باشند.

هوش مصنوعی و زیستشناسی
به گفته بارت دویسترهوف « در طبیعت نمونههای بیشماری یافت میشوند که میتوانند با تکیه بر تواناییهای محدود خود، با موفقیت عملیات مسیریابی و مکانیابی منبع بو را انجام دهند. مثلا، مگسهای میوه که به طور تقریبی فقط از 10000 نورون تشکیل شده است، میتوانند در فصل تابستان محل نگهداری موزها را در آشپزخانه شما پیدا کنند. این موجودات با ترکیب رفتارهای سادهای همچون پرواز در خلاف جهت باد یا رو به باد میتوانند بو را تشخیص دهند. با این وجود، ما، به دلیل عدم استفاده از حسگرهای جریان هوا نمیتوانیم این رفتارها را مستقیماً در درباتهای خود شبیهسازی کنیم. به همین دلیل، برای مکانیابی محل نشت گاز، رفتارهای مشابهی را در آنها شبیهسازی کردهایم.»
در طراحی این ریزپهپادها از یک الگوریتم «باگ» جدید موسوم به Sniffy Bug استفاده شده است. پهپادها برای اینکه بتوانند نشت گاز را تشخیص بدهند در سراسر محیط پراکنده میشوند و از موانع عبور میکنند و مواظب هستند که با یکدیگر تصادف نکنند. به محض اینکه یکی از پهپادها نشت گاز را تشخیص داد به پهپادهای دیگر اطلاع میدهد. از این لحظه به بعد، این ریزپهپادها با همکاری یکدیگر، در کوتاهترین زمان ممکن، منبع نشت گاز را پیدا میکنند. در مرحله بعدی، دسته ریزپهپادها با استفاده از الگوریتمی به نام بهینهسازی ازدحام ذرات (POS) به دنبال منطقهای میگردد که غلظت گاز در آن بیشتر است.
در اینجا، هر پهپاد یک ذره در نظر گرفته میشود. این الگوریتم در اصل از روی رفتارهای اجتماعی و حرکات دستههای پرندگان مدلسازی شده است. این الگوریتم، پهپادها را با توجه به منطقهای که به تشخیص آنها بیشترین میزان غلظت گاز را دارد، اینرسی جهت حرکت و مرتفعترین محل قرارگیری دسته به حرکت در میآورد. POS به عنوان یکی از راهبردهای پژوهشی، فقط میزان غلظت گاز و نه گرادیان غلظت آن و جهت باد، را اندازهگیری میکند.
کاربرد در دنیای واقعی
به گفته گیدو، نتایج این پژوهش نشان میدهد که این دسته از ریزپهپادها قادر به انجام کارهای دشوار گوناگونی هستند. او امیدوار است که کار آنها الهامبخش سایر پژوهشگران رباتیک باشد و در نوع هوش مصنوعی مورد نیاز جهت پرواز خودکار، تجدید نظر کنند.
توسعه این فنآوری به محصولی کاملاً کاربردی نیازمند انجام پژوهشهای بیشتر است. برای مثال، در پژوهش حاضر راهحلی برای حرکت در سه بُعد و تشخیص منبع گاز در محلهای مرتفع ارائه نشده است. علاوه بر این، پیش از اینکه از این پهپادها در موقعیتهای اضطراری و واقعی استفاده شود، قابلیت مسیریابی آنها باید ارتقا یابد.
در هر حال، نتایج این پژوهش بسیار امیدوارکننده است. البته هنوز نمیتوان از الگوریتمهایی که این پژوهشگران توسعه دادهاند در نشت یابی لوله گاز در ساختمانها استفاده کرد، اما در مأموریتهای علمی همچون تشخیص وجود متان در سیاره مریخ و یا تشخیص بیماریها و آفات گلخانهها مؤثر خواهند بود.
انواع کاربردهای هوش مصنوعی در صنایع مختلف را در هوشیو بخوانید