ربات ارزان «جوی» انسداد و آسیب در باریکترین لولهها را شناسایی میکند
 تیم تحریریه
تیم تحریریه- ۲۵ آبان ۱۴۰۱
شناسایی انسداد و آسیبهایی که در لولههای چاه زیرزمینی وجود دارد، مستلزم هزینه بالایی برای دولتها بوده ضمن آنکه اختلالات ترافیکی، مزاحمت شهروندان و حتی آلودگی زیستمحیطی را نیز در پی دارد؛ اما محققان توانستهاند تمامی این معضلات را در سایه اختراع رباتی مینیاتوی با نام «جوی» حل کنند. این ربات کوچک 70 گرمی میتواند خود را از مسیر پرپیچوخم لولههای 7.5 سانتی عبور دهد، درحالیکه برای ساخت آن تنها 300 پوند هزینه صرف میگردد.
به گزارش هوشیو، زیر خیابانهای شهرهای ما لولههای پرپیچوخمی از مجرای آب، فاضلاب و گاز قرار دارد. بازرسی منظم این لولهها از نظر نشتی یا تعمیر معمولاً مستلزم حفر آنهاست. مورد دوم نه تنها طاقتفرسا و پرهزینه است (با هزینه تخمینی سالانه 5.5 میلیارد پوند تنها در بریتانیا) بلکه باعث اختلال در ترافیک و همچنین مزاحمت برای افرادی که در نزدیکی این محلها زندگی میکنند نیز میشود، ضمن آنکه به محیط زیست نیز آسیب میرساند.
حال رباتی را تصور کنید که میتواند راه خود را از طریق باریکترین شبکههای لوله پیدا کرده و تصاویر آسیب یا موانع را برای اپراتورهای انسانی ارسال کند. یک مطالعه جدید در Frontiers in Robotics and AIتوسط تیمی از محققان دانشگاه لیدز نشان میدهد که، تصور این ربات دیگر برای بشر یک رویا نیست .
دکتر نتتا کوهن، پروفسور دانشگاه لیدز و فینال، گفت: «درچنین مواردی و برای حل معضلاتی اینچنینی، ما «جوی» را معرفی میکنیم (یک ربات مینیاتوری جدید) و نشان میدهیم که جویها میتوانند شبکههای لوله واقعی را بهطور کامل و بدون نیاز به دوربین برای مسیریابی کشف نمایند.»
«جوی» اولین رباتی است که میتواند به تنهایی ازمیان پیچوخم لولههایی به عرض 7.5 سانتیمتر عبور کند. وزن این ربات تنها 70 گرم است و به اندازهای کوچک است که در کف دست شما جای میگیرد.
پروژه Pipebots
کار ساخت این ربات بخشی از پروژه “Pipebots” دانشگاههای شفیلد، بریستول، بیرمنگام و لیدز با همکاری شرکتهای خدماتی بریتانیا و سایر شرکای دانشگاهی و صنعتی بینالمللی است.
نویسنده اول دکتر Thanh Luan Nguyen، دانشمند فوقدکترا در دانشگاه لیدز که الگوریتمهای کنترل «جوی» را توسعه داده، گفت: «شبکههای آب زیرزمینی و فاضلاب برخی از کمترین محیطهای مهماننوازی هستند که نه تنها برای انسان، بلکه برای رباتهای Sat Nav زیرزمینی نیز قابل دسترس نیستند. ایندرحالی است که جویها کوچک هستند و بنابراین باید با موتورهای بسیار ساده، حسگرها و رایانههایی که فضای کمی را اشغال میکنند، کار کنند، درحالیکه باتریهای کوچک باید بتوانند برای مدت زمانی طولانی کار کنند.»

«جوی» روی «پایههای چرخ» چاپ سهبعدی حرکت میکند که در بخشهای مستقیم میچرخد و از روی موانع کوچک عبور میکند. این دستگاه مجهز به طیف وسیعی از سنسورهای کممصرف است که فاصله آن تا دیوارها، اتصالات و گوشهها، ابزارهای ناوبری، میکروفون و دوربین و نورافکن را اندازهگیری میکند، تا از عیوب شبکه لوله فیلمبرداری کرده و تصاویر را ذخیره سازد. تولید نمونه اولیه این ربات تنها 300 پوند هزینه داشت.
گلولای و لغزندگی
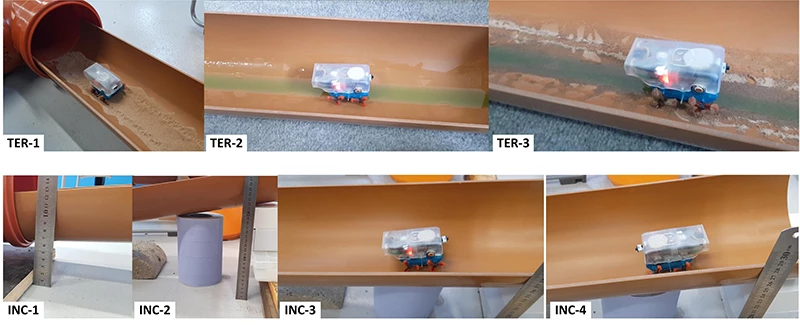
این تیم نشان داد که «جوی» میتواند راه خود را بدون هیچ دستورالعملی از اپراتورهای انسانی، ازطریق شبکه آزمایشی لولهها شامل یک اتصال T، یک گوشه چپ و راست، یک بنبست، یک مانع و سه بخش مستقیم پیدا کند. به طور متوسط، «جوی» موفق شد حدود یک متر شبکه لوله را در کمتر از 45 ثانیه کاوش کند.
برای سختتر کردن زیست ربات، محققان تأیید کردند که این ربات میتواند بهراحتی در لولههای شیبدار با شیبهای واقعی حرکت کند و برای آزمایش توانایی «جوی» برای حرکت در لولههای گلآلود یا لغزنده، آنها همچنین شن و ژل چسبناک (درحقیقت مایع ظرفشویی) را به لولهها اضافه کردند، اما این آزمایش بازهم به موفقیت منجر شد.
نکته مهم این است که، سنسورها بهاندازهای هستند که به «جوی» اجازه میدهند بدون نیاز به روشن کردن دوربین یا استفاده از بینایی کامپیوتر حرکت کند. این امر باعث صرفهجویی در انرژی و افزایش عمر باتری فعلی «جوی» میشود. هر زمان که انرژی باتری کم شود، «جوی» به نقطه اصلی خود باز میگردد، تا از منبع برق تغذیه کند.
درحالحاضر، جویها یک نقطهضعف دارند و آن این است که اگر ناخواسته مانند لاکپشتها وارونه به پشت بچرخند، نمیتوانند وضعیت خود را اصلاح کرده و به حالت اولیه بازگردند. محققان میگویند نمونه اولیه بعدی قادر به غلبه بر این چالش خواهد بود. نسلهای آینده «جوی» همچنین باید ضدآب باشند تا بتوانند در زیر آب و لولههایی که کاملاً پر از مایع هستند، به کار خود ادامه دهند.
آینده «جوی» مشارکتی است
هدف دانشمندان Pipebots ایجاد دستهای از جویها است که با هم ارتباط برقرار کرده و بتوانند با هم کار کنند. برایناساس یک ربات بزرگتر «مادر» به نام کانگا، که درحالحاضر توسط برخی از همان محققان در دانشکده محاسبات لیدز درحال توسعه و آزمایش است، به حسگرهای پیچیدهتر و ابزارهای تعمیر مانند بازوهای ربات مجهز خواهد شد که میتواند چندین «جوی» را حمل کند.
کوهن در این خصوص گفت: «درنهایت امیدواریم سیستمی طراحی کنیم که بتواند وضعیت شبکههای لوله گسترده را بازرسی و نقشهبرداری کند، لولهها را درطول زمان نظارت کند و حتی برخی از وظایف نگهداری و تعمیر آنها را نیز عهدهدار گردد. ما این فناوری را برای افزایش مقیاس و تنوع، ایجاد یک محیط زیست از چند گونه رباتهایی که زیرزمینی با یکدیگر همکاری میکنند، تصور میکنیم. در این سناریو، گروههای «جوی» توسط رباتهای بزرگتری که قدرت و قابلیتهای بیشتری دارند اما محدود به لولههای بزرگتر هستند، در محل مستقر میشوند. رویارویی با این چالش به تحقیق، توسعه و آزمایش بیشتری طی 10 تا 20 سال نیاز دارد. با این اوصاف جویها ممکن است در حدود سال 2040 یا 2050 شروع به کار نمایند.»
جدیدترین اخبار هوش مصنوعی ایران و جهان را با هوشیو دنبال کنید