دوربین هوشمند طراحی شده توسط پژوهشگران دقیقا میداند کجاست
 تیم تحریریه
تیم تحریریه- ۵ تیر ۱۴۰۰
پژوهشگران دانشگاه بریستول دوربین هوشمند جدیدی معرفی کردهاند که با ایجاد نقشهای مصور میتواند نشان دهد پیشتر در چه موقعیت مکانی قرار داشته است. این نقشه به تعیین موقعیت فعلی دوربین هوشمند نیز کمک میکند. این قابلیت در ساخت حسگرهای هوشمند، اتومبیلهای خودران و رباتیک و هوش مصنوعی بسیار پرکاربرد خواهد بود.
شناسایی موقعیت فعلی بر روی نقشه یکی از مهمترین اطلاعات مورد نیاز برای مسیریابی است. این اطلاعات به برنامهریزی برای مقصد بعدی و همچنین رهگیری مسیرهای قبلی کمک میکند. این قابلیت در ساخت محصولات هوشمند، از جاروبرقی هوشمند گرفته تا دوربین هوشمند و پهبادهای تحویل کالا و حسگرهای پوشیدنیِ مانیتورینگ سلامتی نقش بسیار مهمی دارد.

با این حال، مانع مهمی که پیش روی ساخت سیستمهای مبتنی بر نقشه (نگاشت و استفاده از آن) قرار دارد، پیچیدگی و وابستگی آنها به سیگنالهای ارسالی از دستگاههای خارجی مانند GPS است. این دستگاهها اغلب داخل ساختمان کار نمیکنند، یا به دلیل تعدادِ زیادِ مولفههای درگیر انرژی زیادی مصرف میکنند.
والتریو مایول کیواس، استاد رباتیک، بینایی کامپیوتر، و سیستمهای متحرک از دانشگاه بریستول (دانشکده علوم کامپیوتر) رهبری تیم سازنده این فناوری نوین را بر عهده دارد.
او میگوید «گاهی اوقات قابلیتهای چشمگیری مانند قابلیت تشخیص مسافت را دستکم میگیریم. زنبور یا مورچه را در نظر بگیرید. این جانوران با استفاده از اطلاعات تصویری مسیریابی میکنند و از پس پیمایشهای بسیار پیچیده بر میآیند آن هم بدون GPS یا مصرف بیش از حد انرژی».

«دلیل عمده موفقیت این جانوران این است که سیستم بینایی آنها بسیار کارآمد است و برای ساخت نقشه و استفاده از آن طراحی شده است و رباتها هنوز نمیتوانند در این زمینه با آنها رقابت کنند».
با این حال نسل جدید حسگرهای پردازنده، که این تیم پژوهشی آن را Pixel Processor Array (PPA) مینامد، قابلیت پردازش روی حسگر را دارند. به عبارت دیگر همزمان با دیدن تصاویر دستگاه میتواند تصمیم بگیرد چه اطلاعاتی را ذخیره کند و چه اطلاعاتی را کنار بگذارد و تنها از آن دسته از اطلاعاتی استفاده کند که برای انجام وظیفه محول شده به آنها نیاز دارد.
معماری SCAMP یک نمونه از دستگاههای PPA است. این معماری توسط پیتردودِک، استاد سیستمها و مدارهای الکترونیکی دانشگاه منچستر و تیمی از همکاران او ساخته شده است. SCAMP در ازای هر پیکسل یک پردازنده کوچک دارد که انجام محاسبات کلان و موازی را بر روی حسگر امکانپذیر میسازد.
تیم دانشگاه بریستول قبلاً نشان داده بودند که چگونه سیستمهای جدید میتوانند با هزاران فریم در ثانیه اجسام را شناسایی کنند. اما تحقیقات جدید قابلیت حسگرهای پردازنده در ترسیم نقشه و استفاده از آن را همزمان با ثبت تصویر نشان میداد.این پژوهش بخشی از پایان نامه ارشد هکتور کاستیو الیزالد، دانشجوی کارشناسی ارشد رشته رباتیک در دانشگاه بریستول، با راهنمایی یانن لیو و دکتر لاوری بوس است. یانن لیو، دانشجوی دکتری است و برای رساله دکتری خود بر روی همین موضوع کار میکند.
هکتور کاستیو الیزالد و تیم پژوهشی یک الگوریتم نگاشت تصویر طراحی کردند که تمام پردازشها را روی حسگر پردازنده انجام میدهد.
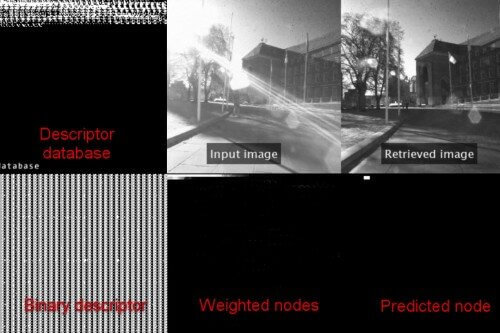
ساز وکار این الگوریتم بسیار ساده است: زمانی که یک عکس جدید دریافت میشود، الگوریتم تصمیم میگیرد که تصویر دریافتی با تصاویری قبلی شباهتی دارد یا خیر. اگر تصویر متفاوت باشد برخی از اطلاعات آن را ذخیره میکند و اگر تصویر مشابه تصاویر قبلی باشد، آن را کنار میگذارد.
دستگاه PPA توسط فرد یا ربات در محیط به حرکت درمیآید و همزمان از مناظر عکس میگیرد و یک مجموعه عکس ایجاد میکند. این مجموعه (کاتالوگ) بعداً و زمانی که دستگاه بر روی حالت شناسایی موقعیت است برای مقایسه عکسهای جدیدی استفاده میشود.
از همه مهمتر اینکه هیچ تصویری، به غیر از دادههای اصلیای که موقعیت عکس را بر اساس کاتولوگ مشخص میکنند، به خارج از دستگاه PPA ارسال نمیشود. به همین دلیل مصرف انرژی این سیستم بهینه است و حریم خصوصی در آن حفظ میشود.
تیم پژوهشی سازنده این دستگاه معتقد است که این نوع از سیستمهای بینایی مصنوعی، یا به عبارتی سیستمهایی که علاوه بر ضبط تصویر در پردازش بصری استفاده میشوند، گامی بلند در جهت ساخت سیستمهای هوشمند کارآمدتر هستند؛ سیستمهایی که میتوانند از اطلاعات تصویری برای درک محیط و حرکت در دنیای اطراف استفاده کنند. رباتهای بسیار کوچک و کممصرف یا عینکهای هوشمند که در حال خدمت رسانی به سیاره و مردم روی آن هستند، به زودی به درک فضایی نیاز پیدا میکنند، درکی که از قابلیت آنها برای ترسیم نقشه و نقشه خوانی سرچشمه میگیرد.
جدیدترین اخبار هوش مصنوعی ایران و جهان را با هوشیو دنبال کنید