ساخت اولین «ربات پیوسته» قابل برنامهریزی، با الهام از خرطوم فیل
 تیم تحریریه
تیم تحریریه- ۸ بهمن ۱۴۰۱
رباتهای معمولی مبتنی بر مفاصل جداگانه، همواره در انجام کارهای پیچیده دنیای واقعی بهویژه آنهایی که شامل دستکاری ماهرانه اشیا هستند، خوب عمل نمیکنند. بنابراین، برخی از رباتیکها تلاش کردهاند نوعی از ربات معروف به رباتهای پیوسته را توسعه دهند. این رباتها، پلتفرمهای رباتیکی دارای آزادی بینهایت در حرکت و بدون تعداد مفاصل مشخص هستند. این ساختار باعث میشود که آنها بسیار سازگار باشند، بتوانند در محیطهای پیچیده حرکت کنند و طیف گستردهای از محمولهها را درک نمایند. این موضوع باعثشده آنها بهطور فزایندهای در بین رباتیکها محبوب شوند.
بهگزارش هوشیو، رباتهای پیوسته معمولاً بر پایه کابلها یا سایر اجزای تغییرشکلپذیر ساخته میشوند و بههمیندلیل میتوانند، آزادانهتر حرکت کنند و توسط ساختارهای اتصالی ثابت محدود نمیشوند. باوجود این مزایا، بسیاری از طرحهای ربات پیوسته پیشنهادی هنوز نمیتوانند بهصورت موثری در محیطهای پیچیده و بدون ساختار حرکت کنند.
محققان دانشگاه Sun Yat-Sen، دانشگاه صنعتی Dalian و دانشگاه بانک جنوبی لندن اخیراً یک ربات پیوسته جدید با الهام از خرطوم فیلها ساختهاند. این ربات که در مقاله منتشرشده در Soft Robotics معرفی گردیده، طراحی قابلتنظیمی دارد که به آن امکان میدهد برای کاربردهای مختلف مورداستفاده قرار گیرد.
Jianing Wu، یکی از محققانی که در این مطالعه شرکت داشته به Tech Xplore گفت: «ما کشف کردیم، زمانی که رباتهای زنجیرهای کابلی تغییر شکل میدهند، همواره تمایل دارند بهصورت دایرهای درآیند. این امر باعث میشود، آنها نتوانند با محیطهایی که دارای انحنای متفاوت هستند، تعامل داشته باشند. برای غلبه بر این محدودیت، ما سعی کردیم یک الگوی رباتیک پیوسته، بهمنظور انطباق با سناریوهای کاربردی، با انحناهای متفاوت پیشنهاد کنیم.»
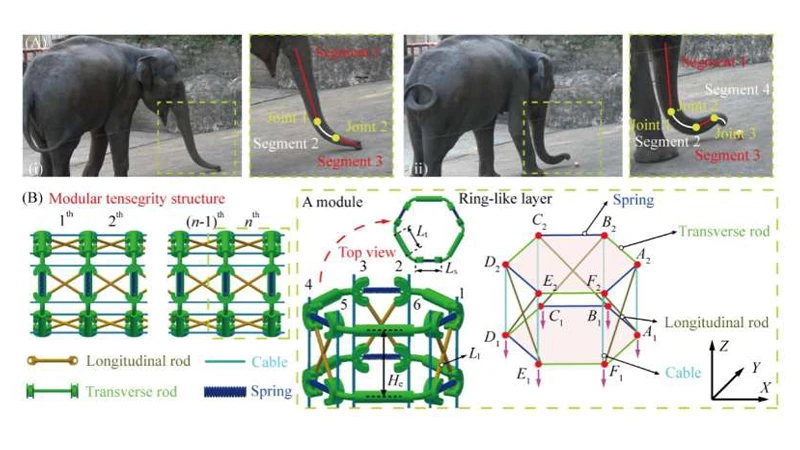
ساختار خرطوم فیل بهصورت طبیعی به بخشهای محدودی تقسیم میشود که توسط شبهمفاصل به یکدیگرمتصل میشوند. این موضوع به آنها اجازه میدهد تا به روشی کارآمدتر با محیط اطراف خود تعامل داشته باشند. بهعنوانمثال، فیل با داشتن این ساختار بدنی میتواند تنه خود را در فضاهای باریک فشرده کند، یا خود را به شاخههای بالاتر درختان برساند.
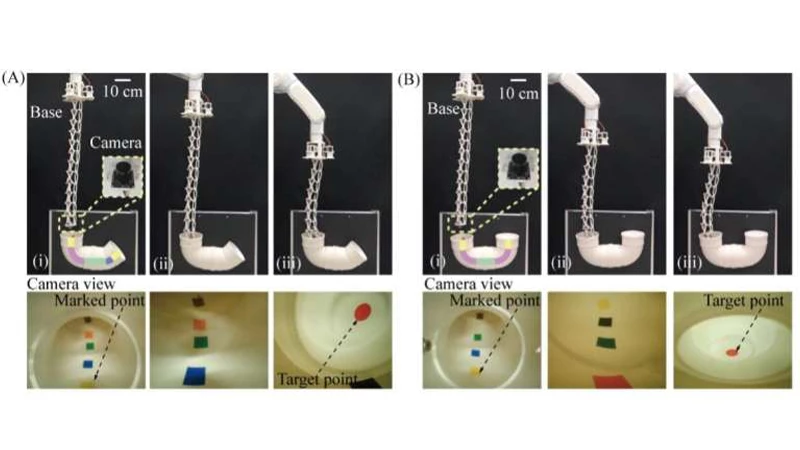
Haijun Peng که یکی دیگر از محققین این مطالعه است توضیح داد: «با الهام از حرکات خرطوم فیل، ما یک ربات پیوسته ساختیم که قادر است میزان سختی بدنش را در قسمتهای مختلف تغییر دهد. این قابلیت به ربات ما این امکان را میدهد تا از طریق خطوط لوله با انحناهای مختلف حرکت کند، موضوعی که پیشتر بهعنوان یک مشکل رباتیک رایج بهشمار میرفت.»
Wu گفت: «ربات پیوسته میتواند، شکل و پیکربندی خود را بسته بهسختی محیطی که با آن در تعامل است، تغییر دهد. این به آن معنی است که ربات میتواند خود را با هرگونه انحنای محیطی در سطوح سختی مختلف مطابق سازد. این امر پیچیدگی سیستمهای کنترل را برطرف میکند، زیرا ربات میتواند از هوش ذاتی خود برای سازگاری با محیط استفاده نماید.»
محققان تاکنون از طراحی خود برای ایجاد یک نمونه اولیه ربات متشکل از 12 ماژول کششی استفاده کردهاند. سپس آنها از این ماژولها برای ایجاد یک نمونه اولیه ربات استفاده کردند و قابلیت تغییرشکل آن را در چندین سناریو مختلف آزمایش دادند. این آزمایش نشانگر آن است که ربات مذکور میتواند برای کاربردهای مختلفی مورد استفاده قرار گیرد، همچون رباتهایی که میتوانند در فضاهای تنگ فشرده شوند یا به شکل خاصی تغییر شکل دهند.
Wu گفت: «تکامل حیوانات باعثشده که آنها تواناییهای شگفتانگیزی پیدا کنند و اگر برای مشاهده آنها وقت بگذاریم، میتوانیم از این تواناییها بهعنوان الگویی الهامبخش بهمنظور طراحی رباتها استفاده کنیم. بهعنوانمثال، روشی که یک فیل از خرطوم خود برای تعامل با محیط خود استفاده میکند، میتواند بهعنوان راهنمای ایجاد رباتی مورد استفاده قرار گیرد که قادر به تعامل با محیطهایی با سطح انحناهای مختلف است.»