ربات پرندهای که فرود حرفهایاش همه را شگفتزده کرد!
 تیم تحریریه
تیم تحریریه- ۱ دی ۱۴۰۱
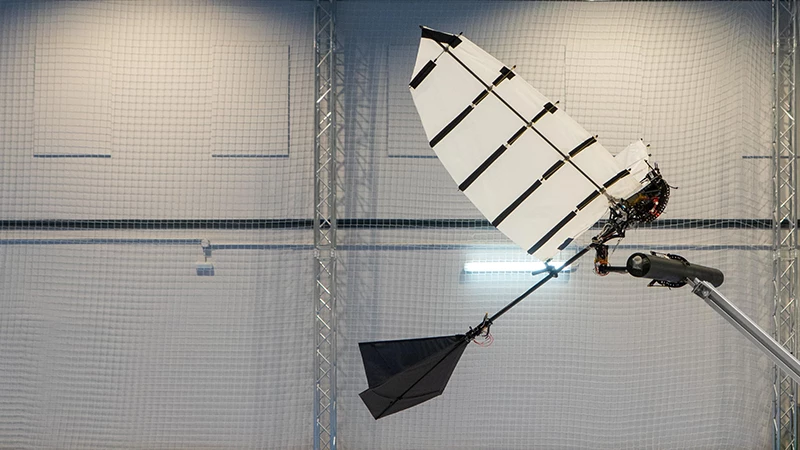
محققان EPFL موفق شدهاند رباتی بسازند که با استفاده از مکانیزم پنجهمانندش به طور مستقل فرود میآید. این نوآوری در حقیقت، وظیفهای دیگر به وظایف رباتها اضافه کرده است. در واقع، فرود آمدن این ربات پرنده چنان به نظر طبیعی میآید که گویی سادهترین کار در جهان انجام گرفته است؛ اما حقیقت آن است که یک نشستن به ظاهر ساده این ربات پرنده شامل تعادل بسیار ظریفی از زمانبندیها، سرعت و دقت است. این طریقه نشستن به قدری پیچیده است که هیچ ربات پرندهای تاکنون نتوانسته شبیه آن باشد.

جالب این است که فرود آمدن یک پرنده کوپتر بر روی یک سکو بدون هیچ دستور خارجی مستلزم این است که بسیاری از عواملی که در این کار دخالت دارند، مدیریت شوند و خوشبختانه این کار قبلاً به طور فطری از طریق آفریدههای جهان خلقت به نمایش گذاشته شده است.
رافائل زوفری، دانشجوی فوق دکترا در آزمایشگاه سیستمهای هوشمند (LIS) و Biorobotics ab (BioRob) در دانشکده مهندسی، اولین نویسنده در مقاله اخیر Nature Communications است که توصیف نشستن این ربات پرنده را به شیوهای انجام داده است که گویی ارابه منحصربهفردی در حال فرود آمدن است. او این ربات را با همکاری همکارانش در دانشگاه سویل، اسپانیا ساخت و آزمایش کرد، درست جایی که خود این پرنده 700 گرمی به عنوان بخشی از پروژه اروپایی GRIFFIN توسعه یافته است.
وی در این خصوص میگوید: «این اولین مرحله از یک پروژه بزرگتر است. هنگامی که یک پرنده کوپتر بتواند به طور مستقل بر روی شاخه درخت فرود بیاید، بیشک پتانسیل انجام وظایف خاصی مانند جمعآوری بدون مزاحم نمونههای بیولوژیکی یا اندازهگیری از یک درخت را نیز خواهد داشت.»
او در ادامه میافزاید: «وقتی این ربات پرنده توانایی فرودی به این خوبی دارد، مطمئناً میتواند شیوه کارآمدتری برای بسیاری از وسایل نقلیه هوایی بدون سرنشین یا پهپادها فراهم کند که عمر باتری محدودی دارند، شیوهای همچون شارژ مجدد باتری با استفاده از انرژی خورشیدی. بدین طریق آنها را برای مأموریتهای دوربرد در آینده ایدهآل خواهد کرد.»
رافائل زوفری در این باره امیدوار است که ساخت این ربات یک گام بزرگ به سوی پیشرفت رباتهای پرندهای است که فقط میتوانند پروازهای رایگان را برای کارهای دستکاری و دیگر برنامههای کاربردی در دنیای واقعی انجام دهند.